Since shapes outlines are often
represented with two-dimensional curves, many shape-space
models arise from the design of spaces of plane curves. Such
spaces are generally associated to smoothness
(differentiability) requirements for the curves, and come with
a metric space structure since comparing shapes has important
practical applications. Most of the spaces of plane curves
that have been proposed in the literature actually possess
richer structures, many of them providing infinite-dimensional
Riemannian manifolds. In such spaces, the distance is
associated to paths of least energy in shape space, yielding
optimal shape evolutions, or geodesics. It is
important to remark that shape spaces are not exactly spaces
of curves, but are built upon them via identification of
equivalent classes. For example, curves that are deduced for
each other by translation, rotation and scaling correspond to
the same shape and can be considered as equal. This results in
spaces of shapes represented as quotients spaces of curves via
the action of some linear transformations. Finally, one should
define shapes regardless of their parametrization, which
induces a new quotient, this time by the group of
diffeomorphism of the unit interval, or of the unit circle for
closed curves.
The following papers all discuss a special shape space on which
geodesics are relatively easy to compute, because the associated
space of curves turns out to be isometric to a Hilbert space. In
references [1 - 4], it is noticed that quotienting for scale
results in identifying the shape space to Hilbert sphere. This
argument is pushed further in reference [5], in which it is noticed that
quotienting for rotation with closed curves results in an
identification of the shape space with a Grassmann manifold.
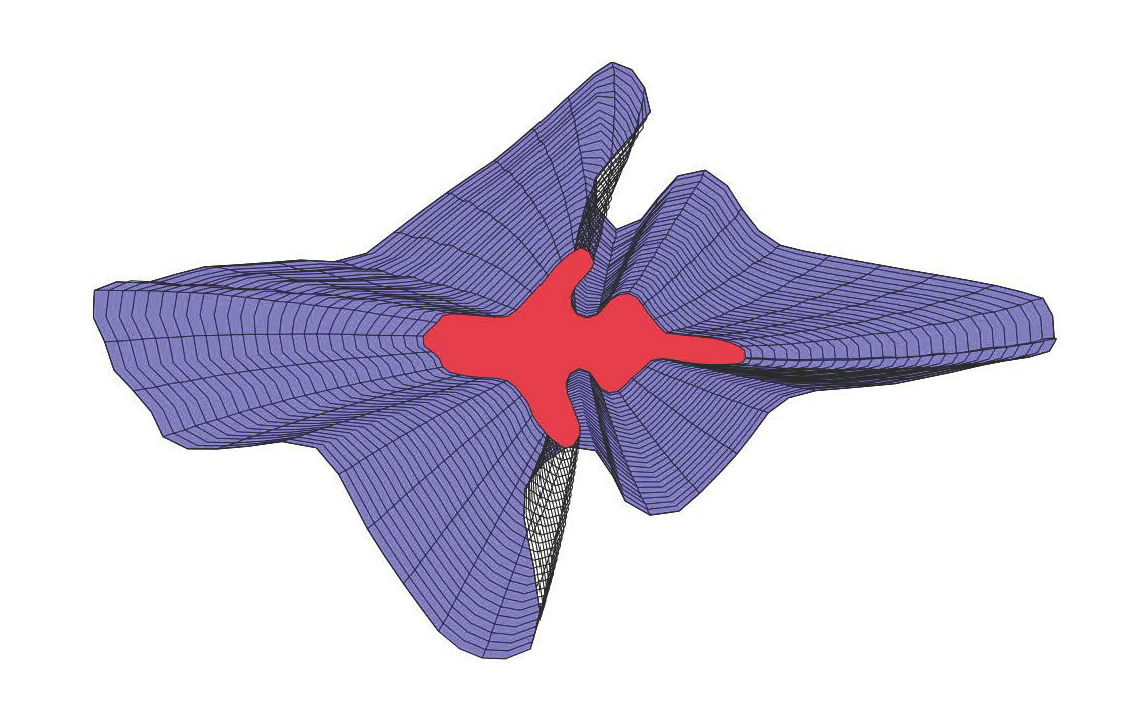
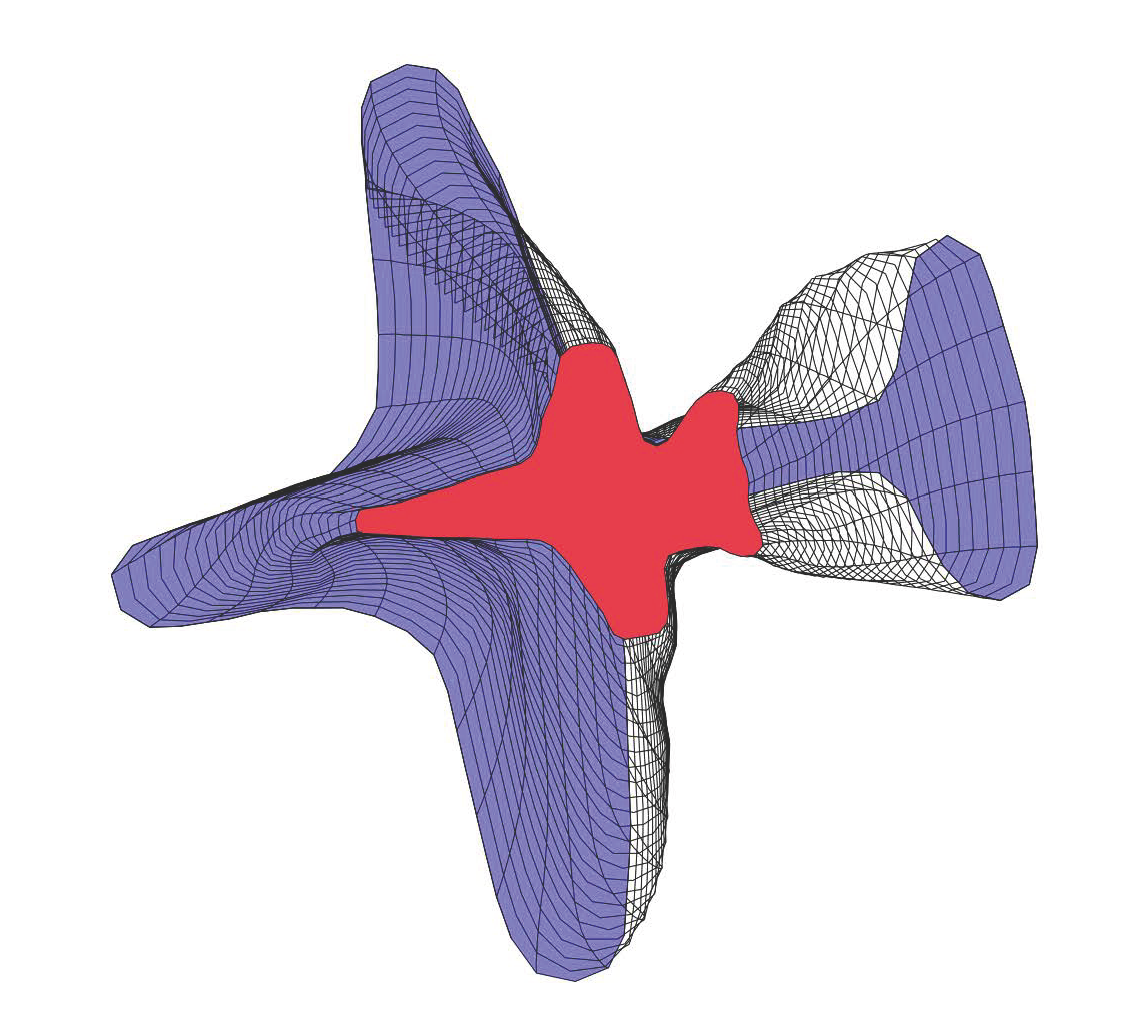
The images below illustrate some geodesic paths in curve space
between selected shapes.
Reference [6] generalizes these results to arbitrary dimensions and large parameter classes, while presenting them in a different angle (that of metamorphosis ).
[1] A distance for elastic
matching in object recognition (Summary)
L.
Younes,
Comptes rendus de l'Académie des sciences. Série
1, Mathématique 322
197--202 (1996)
[2]
A distance for elastic matching in object
recognition, R. Azencott and F.
Coldefy and L. Younes, Pattern Recognition, 1996., Proceedings of
the 13th International Conference on 1 687--691
(1996)
[3] Computable elastic distances between shapes, L. Younes, SIAM Journal on Applied
Mathematics 58 565--586 (1998)
[4]
Optimal matching between shapes via elastic deformations, L. Younes, Image and Vision Computing 17
381--389 (1999)
[5] A metric on shape space with explicit geodesics, L. Younes, PW. Michor, D. Mumford and J. Shah,
Rend. Lincei Mat. Appl. 19 (2008) 25-57.
[6] Elastic distance between curves under the metamorphosis viewpoint arXiv:1804.10155, published in Chapter 12.7 of Shapes and Diffeomorphisms.
The
next two papers discuss a class of curve matching
problems that include the one introduced in reference 1-4
above, and study their properties, regarding, in particular,
the existence of minimizers.
[7]
Diffeomorphic matching problems in one dimension: Designing and
minimizing matching functionals, A. Trouvé and L. Younes,
Computer Vision-ECCV 2000 573--587 (2000)
[8] On
a class of diffeomorphic matching problems in one dimension,
A. Trouvé and L. Younes, SIAM Journal on Control and
Optimization 39 1112--1135 (2000)
Note that many of these results and compiled and extended in Elastic Metrics on Spaces of Euclidean Curves: Theory and Algorithms by Bauer et al.